InSite
InSite
Cognata
Autonomous Car
Simulation Software

Cognata provides a driving validation platform for the autonomous vehicles industry.
The product enables autonomous vehicle manufacturers with the ability to test drive their AI and sensors on our platform, Enabling testing multiple scenarios on different geographic location, Driving millions of miles on our reality-grade platform, providing meaningful feedback’s that enable accelerated AI learning curve and faster product maturity
How Many Miles of Driving Would It Take to train an autonomous car?
At least 8.8 billion miles (14 billion kilometers) of test driving are needed
Kalra and Paddock, 2016
Our product
Virtual testing environment for autonomous vehicle


challenges
-
New market
-
Few users to talk with.
-
A market that is looking for answers rather than ‘giving the answers’
-
Lack of information
I based my research and learning on:
-
Professional articles
-
Interviewing our sales managers and engineers
-
Reading brochures from the main AV yearly event
My mission
-
Create a friendly UI (vs “Upload a SCV file”)
-
Create appealing UI (for investors and new customers)
-
Understating the user journey in our product
-
Suggest new features
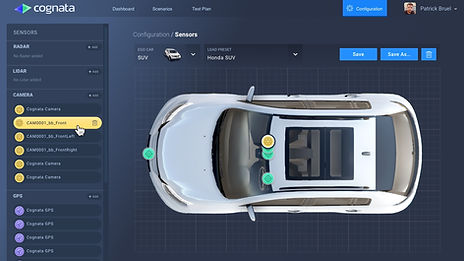
I started my discovery phase by understanding our users’ journey while creating a new “Scenario” or “simulation plan” (a set of scenarios)
Every scenario starts with car configuration. We planned a very intuitive and visual way to select the car type and to place the various sensors to match the specific car.

The “Moving object” challenge
As autonomous vehicle technology continues to evolve, governments are still struggling with regulatory issues. Currently, AV manufacturers are developing their AI according to standards that were published by the 2 leading organizations in the automotive regulatory world.
NHTSA, in the USA & Euro NCAP in Europe.
As part of our research to develop the right tool for our users, we planned our product to enable them to test their AI and sensors to comply with these standards.
One of these standards called the “Moving object” scenario.
A moving object refers to a pedestrian, a cyclist, a cat – that needs to be detected by the AV.
To plan this kind of scenario, the user needs to:
-
Set the Object’s path (set of “Waypoints”)
-
Set a trigger (“The car is 5 sec from the object”)
-
Set an action (“Go”, “Rotate”, “Stop”)
and for each action – a variety of values: ”Speed”, “Acceleration” & “Orientation”.

Research & inspiration
I started with some "Route builder" inspiration from the web (Like Google maps and running apps)
but I realized that I have some unique challenges:
-
Visual overload - Lack of space
-
Many options for each ‘Waypoint” (It’s more than just “Pin” the map)
-
Overlapping is an option (multiple paths)
Guerrilla usability testing
-
Together with the R&D team, I prepare a real mock
-
I tested it with people within the company and from the startup next door
-
I wanted to learn what is the intuitive way for people to create a path, to end a path, to delete…
-
Do they use the menu or the keyboard?
-
How do they expect to locate a waypoint on the map?
Solution
The path could be created from both the map and a side panel:

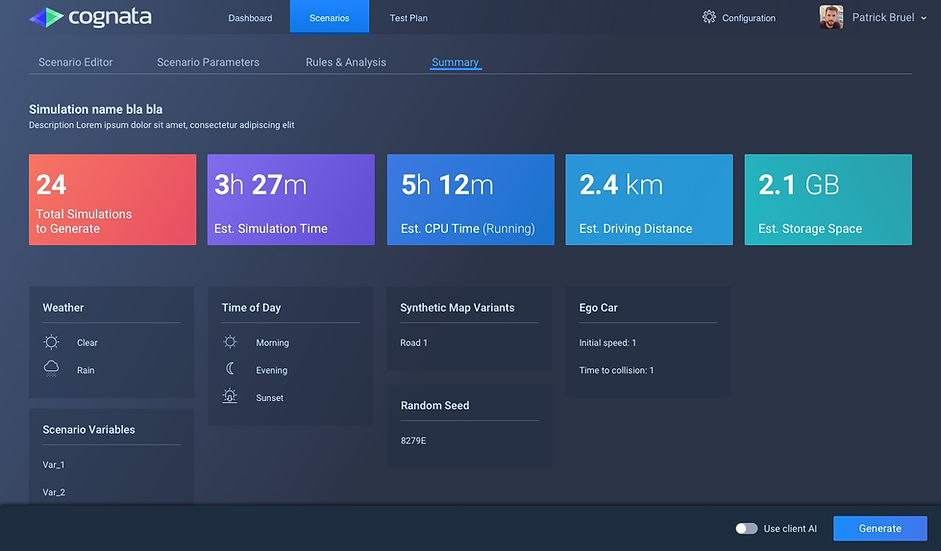
Test plan summary
“Test plans” are generated by sets of selected parameters - a single plan may result in up to hundreds of simulations.
Our customers' pricing model was based on how much "cloud time" they consumed from Cognata's cloud.
We needed to offer them a way to validate their "Test plan" before they run it.
Dashboard & Simulation results


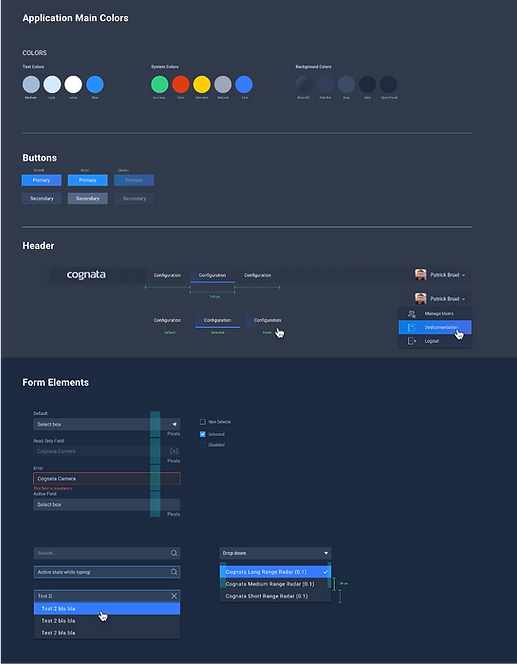
Complete design system